\[ \newcommand{\Z}{\mathbb Z} \newcommand{\Q}{\mathbb Q} \newcommand{\R}{\mathbb R} \newcommand{\C}{\mathbb C} \newcommand{\F}{\mathbb F} \newcommand{\K}{\mathbb K} \newcommand{\LL}{\mathbb L} \newcommand{\N}{\mathbb N} \newcommand{\sym}[1]{\operatorname{Sym}(#1)} \newcommand{\GLV}[1]{\operatorname{GL}(#1)} \newcommand{\SLV}[1]{\operatorname{SL}(#1)} \newcommand{\GL}[2]{\operatorname{GL}(#1,#2)} \newcommand{\SL}[2]{\operatorname{SL}(#1,#2)} \newcommand{\lxor}{\dot\lor} \newcommand{\cond}{\Rightarrow} \newcommand{\bicond}{\Leftrightarrow} \newcommand{\mdc}[2]{\operatorname{mdc}(#1,#2)} \newcommand{\grau}[1]{\operatorname{grau}(#1)} \newcommand{\real}[1]{\mathfrak R(#1)} \newcommand{\imag}[1]{\mathfrak I(#1)} \newcommand{\argz}[1]{\mbox{arg}(#1)} \DeclareMathOperator{\sen}{sen} \newcommand{\cis}[1]{\cos #1+i\sen #1} \newcommand{\E}{\mathbb E} \newcommand{\aut}[1]{\textrm{Aut}(#1)} \newcommand{\fix}[1]{\textrm{Fix}(#1)} \newcommand{\gal}[2]{\textrm{Gal}(#1:#2)} \newcommand{\overbar}[1]{\mkern 1.5mu\overline{\mkern-1.5mu#1\mkern-1.5mu}\mkern 1.5mu} \newcommand{\ul}[1]{\underline{#1}} \newcommand{\tn}[1]{\textnormal{#1}} \newcommand{\rot}[1]{\mbox{Rot}(#1)} \newcommand{\refl}[1]{\mbox{Ref}(#1)} \]
48 Transformações lineares
A definição de transformações lineares
Sejam \(V\), \(W\) dois espaços vetoriais. Já que \(V,W\) são conjuntos, faz sentido considerar uma função \(f:V\to W\) (logo \(f\) leva cada vetor de \(V\) em um vetor de \(W\)). Mas uma função qualquer vai geralmente fazer uma bagunça total. As funções melhores \(V\to W\) são aquelas que “respeitam as estruturas de \(V\) e \(W\) como espaços vetoriais”. Tais funções são as seguintes:
Definição 48.1 Sejam \(V,W\) dois espaços vetoriais sobre \(\R\). Uma função \(T:V\to W\) é uma transformação linear (TL) se
\(T(\ul{u} + \ul{v}) = T(\ul{u}) + T(\ul{v})\quad\forall \ul{u}, \ul{v}\in V\),
\(T(\lambda \ul{v}) = \lambda T(\ul{v})\quad\forall \lambda\in \R,\,\forall \ul{v}\in V\).
Exemplo 48.1
Sejam \(V,W\) espaços vetoriais e \(Z:V\to W\) a transformação nula, que leva cada \(\ul{v}\in V\) no vetor \(\ul{0}\). Vamos confirmar que \(Z\) é uma transformação linear: \[Z(\ul{u} + \ul{v}) = \ul{0} = \ul{0} + \ul{0} = Z(\ul{u}) + Z(\ul{v})\quad\forall \ul{u}, \ul{v}\in V\quad\checkmark\] \[Z(\lambda\ul{v}) = \ul{0} = \lambda\cdot \ul{0} = \lambda Z(\ul{v})\quad\forall\lambda\in \R, \forall \ul{v}\in V\quad\checkmark\]
A função identidade \(I:V\to V\) é uma transformação linear: \[I(\ul{u} + \ul{v}) = \ul{u} + \ul{v} = I(\ul{u}) + I(\ul{v})\quad\forall \ul{u}, \ul{v}\in V\quad\checkmark\] \[I(\lambda\ul{v}) = \lambda\ul{v} = \lambda I(\ul{v})\quad\forall\lambda\in \R, \ul{v}\in V\quad\checkmark\]
A função \(T: \R^2\to \R\) definida como \(T(x,y) = 2x-y\) é uma TL: \[\begin{aligned} T\left((x,y) + (x',y')\right) & = T\left((x+x',y+y')\right) \\ & = 2(x+x')-(y+y)' \\ & = 2x-y+2x'-y' \\ & = T\left((x,y)\right) + T\left((x',y')\right)\quad\checkmark \end{aligned}\] \[\begin{aligned} T(\lambda(x,y)) & = T\left((\lambda x, \lambda y)\right) \\ & = 2\lambda x - \lambda y \\ & = \lambda(2x-y) \\ & = \lambda T\left((x,y)\right).\quad\checkmark \end{aligned}\]
A função \(T:\R[x]\to \R[x]\) que manda \(f(x)\in\R[x]\) para \(xf(x)\) é uma transformação linear – exercício.
A função \(T : \R \to \R\) que manda \(x\) para \(x+1\) não é uma transformação linear: \[T(1+1) = T(2) = 2+1 = 3\] \[T(1)+T(1) = (1+1) + (1+1) = 4 \neq 3.\]
(Super importante!) Seja \(A\) uma matriz \(n\times m\). Dado um vetor \(\ul{v}\) de \(\R^m\), tratado com vetor coluna \(m\times 1\), o produto \[A\ul{v}\] é um vetor coluna \(n\times 1\), logo \(A\ul{v}\) é um vetor de \(\R^n\). Assim, obtemos uma função \[\begin{aligned} T_A\,:\, \R^m & \to \,\R^n \\ \ul{v}\,\,\, & \mapsto A\ul{v}. \end{aligned}\] Afirmo que \(T_A\) é uma TL. Já que estamos somente multiplicando matrizes, temos \[T_A(\ul{u} + \ul{v}) = A(\ul{u} + \ul{v}) = A\ul{u} + A\ul{v} = T_A(\ul{u}) + T_A(\ul{v})\quad\forall \ul{u},\ul{v}\in \R^m,\] \[T_A(\lambda\ul{v}) = A\cdot\lambda\ul{v} = \lambda A\ul{v} = \lambda T_A(\ul{v})\quad\forall\lambda\in \R, \forall \ul{v}\in \R^m.\] Vamos fazer uns exemplos disso:
Seja \(A = \begin{pmatrix} 1 & 0 & -3 \\ 2 & 1 & 5 \end{pmatrix}\). Então \(T_A: \R^3\to \R^2\) é a transformação linear dada por \[T_A\begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} 1 & 0 & -3 \\ 2 & 1 & 5 \end{pmatrix}\cdot \begin{pmatrix} x \\ y \\ z \end{pmatrix} = \begin{pmatrix} x - 3z \\ 2x + y + 5z \end{pmatrix}\in \R^2.\]
Exemplos 1-3 acima podem ser interpretados dessa forma:
A transformação nula \(\R^m\to \R^n\) é a transformação \(T_{\ul{0}}\) correspondente à matriz nula \(n\times m\) \[\ul{0} = \begin{pmatrix} 0 & \cdots & 0 \\ \vdots & \ddots & \vdots \\ 0 & \cdots & 0 \end{pmatrix},\] pois \(T_{\ul{0}}(\ul{v}) = \ul{0}\cdot\ul{v} = \ul{0}\,,\forall \ul{v}\in \R^m\).
A transformação identidade \(\R^n\to \R^n\) é \(T_I\), onde \(I\) é a matriz identidade \(n\times n\) \[I = \begin{pmatrix} 1 & 0 & \cdots & 0 \\ 0 & 1 & & 0 \\ \vdots & & \ddots & \vdots \\ 0 & 0 & \cdots & 1 \end{pmatrix},\] pois \(T_{I}(\ul{v}) = I\ul{v} = \ul{v}\,\,\forall \ul{v}\in \R^n\).
A transformação \(T:\R^2\to \R\) de Exemplo 3 corresponde a \(T_A\), em que \(A\) é a matriz \(1\times 2\) \[A = \begin{pmatrix} 2 & -1 \end{pmatrix},\] pois \[T_A\begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 2 & -1 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 2x - y \end{pmatrix} = T((x,y)).\]
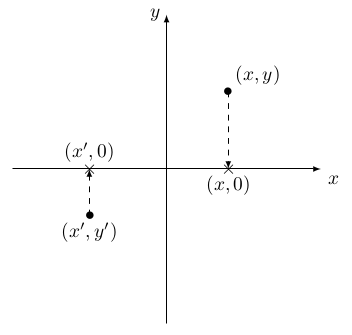
A transformação linear correspondente à matriz quadrada \[A = \begin{pmatrix} 1 & 0 \\ 0 & 0 \end{pmatrix}\] é a “projeção no eixo \(x\)”: \[T_A\begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 1 & 0 \\ 0 & 0 \end{pmatrix}\begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} x \\ 0 \end{pmatrix}:\]
Similarmente, a matriz \(n\times n\) \(E_{ii}\) corresponde à transformaçaõ linear \(\R^n\to \R^n\) “projeção na coordenada \(i\)”: \[T_{E_{ii}}\begin{pmatrix} x_1 \\ x_2 \\ \vdots \\ x_i \\ \vdots \\ x_n \end{pmatrix} = \begin{pmatrix} 0 \\ 0 \\ \vdots \\ x_i \\ \vdots \\ 0 \end{pmatrix}.\]
Exercício 48.1 Seja \(T\colon V\to W\) uma transformação linear, sejam \(\ul{v_1},\ldots,\ul{v_k}\in V\) e \(\lambda_1,\ldots,\lambda_k\in\R\). Mostre que \[T(\lambda_1\ul{v_1}+\cdots+\lambda_k\ul{v_k})=\lambda_1T(\ul{v_1})+\cdots+\lambda_kT(\ul{v_k}).\] Este exercício diz que uma transformação linear leva uma combinação linear de vetorores para a combinação linear das suas imagens com os mesmos coeficientes.
Proposição 48.1 Qualquer transformação linear \(T : V\to W\) leva \(\ul{0}\) em \(\ul{0}\).
Comprovação. O vetor \(\ul{0} = 0\cdot \ul{0}\). Logo \[T(\ul{0}) = T(0\cdot\ul{0}) = 0\cdot T(\ul{0}) = \ul{0}.\] ◻
Sejam \(V,W\) espaços vetoriais. Podemos considerar o conjunto de todas as transformações lineares de \(V\) a \(W\): \[\mathcal{L}(V,W) := \{T: V\to W\,|\,T\hbox{ uma transformação linear}\}.\]
Teorema 48.1 \(\mathcal{L}(V,W)\) é um espaço vetorial.
Comprovação. Já que elementos de \(\mathcal{L}(V,W)\) são funções \(V\to W\), \[\mathcal{L}(V,W)\subseteq \mathcal{F}(V,W).\] Então só precisamos confirmar que \(\mathcal{L}(V,W)\) é subespaço de \(\mathcal{F}(V,W)\). Ou seja, que a soma de duas TLs é uma TL, e que o produto por escalar de uma TL é uma TL. Então sejam \(S,T\in \mathcal{L}(V,W)\) e \(\ul{u}, \ul{v}\in V, \lambda\in \R\). \[\begin{aligned} (S+T)(\ul{u}+\ul{v}) & = S(\ul{u}+\ul{v}) + T(\ul{u}+\ul{v})\qquad\qquad(\hbox{def de soma em }\mathcal{F}(V,W)) \\ & = S(\ul{u}) + S(\ul{v}) + T(\ul{u}) + T(\ul{v}) \quad (S,T\hbox{ são TLs}) \\ & = S(\ul{u}) + T(\ul{u}) + S(\ul{v}) + T(\ul{v}) \\ & = (S+T)(\ul{u}) + (S+T)(\ul{v})\qquad\qquad\checkmark \end{aligned}\] Similarmente \[\begin{aligned} (S+T)(\lambda\ul{u})& = S(\lambda\ul{u}) + T(\lambda\ul{u}) \\ & = \lambda S(\ul{u}) + \lambda T(\ul{u}) \\ & = \lambda (S(\ul{u}) + T(\ul{u})) \\ & = \lambda (S+T)(\ul{u}).\qquad\qquad\checkmark \end{aligned}\] Logo \(S+T\) é transformação linear.
Exercício: Sejam \(T\in \mathcal{L}(V,W)\) e \(\lambda\in \R\). Mostre que a função \(\lambda T\) é uma transformação linear.
Então \(\mathcal{L}(V,W)\) é fechado por somas e produtos por escalar. Ou seja, \(\mathcal{L}(V,W)\) é subespaço de \(\mathcal{F}(V,W)\). ◻
Exemplo 48.2 No caso especial em que \(W = \R\), o espaço vetorial \(\mathcal{L}(V,\R)\) se chama o espaço dual de \(V\) e está denotado por \(V^*\). Os elementos de \(V^*\) são transformações lineares \(V\to \R\) e são chamados de funcionais ou formas lineares de \(V\).
Transformações lineares e matrizes
Quando temos dois conjuntos \(B,C\), é muito fácil definir uma função \(f:B\to C\), pois pode mandar os elementos de \(B\) para \(C\) como quiser, sem condições nenhumas. Com uma transformação linear \(T:V\to W\), não temos tanta liberdade: temos que mandar \(\ul{0}\) para \(\ul{0}\), por exemplo, e \(T\) tem que preservar soma e múltiplo escalar. Mas vamos ver que, de fato, transformações lineares são “igualmente fáceis” como funções, de alguma forma.
Teorema 48.2 Sejam \(V\) um espaço vetorial com base \(B\) e \(W\) outro espaço vetorial. Seja \(f:B\to W\) uma função qualquer. Então existe uma única transformação linear \(T_f:V\to W\) com a propriedade que \[T_f(\ul{b}) = f(\ul{b})\quad\hbox{para todo }\ul{b}\in B.\]
Este teorema diz que “transformações lineares de \(V\) a \(W\) são a”mesma coisa” como funções de uma base de \(V\) a \(W\)“. Vamos prová-lo:
Comprovação. Dada uma função \(f:B\to W\), como vamos definir a transformação linear \(T_f\)? Já que \(B\) é uma base, todo vetor \(\ul{v}\in V\) pode ser escrito como uma combinação linear \[\ul{v} = \lambda_1\ul{b_1} + \cdots + \lambda_n\ul{b_n}\] de elementos de \(B\). Já que \(T_f\) é TL e \(T_f(\ul{b}) = f(\ul{b})\,\forall b\in B\), estamos obrigados a definir \[\begin{aligned} T_f(\ul{v}) & = T_f(\lambda_1\ul{b_1} + \cdots + \lambda_n\ul{b_n}) \\ & = \lambda_1T_f(\ul{b_1}) + \cdots + \lambda_nT_f(\ul{b_n}) \quad(T_f\hbox{ TL})\\ & = \lambda_1f(\ul{b_1}) + \cdots + \lambda_nf(\ul{b_n})\quad\,\,(T_f(\ul{b_i}) = f(\ul{b_i})). \end{aligned}\] Temos que confirmar umas coisas, todas sendo fáceis:
\(T_f\) é bem definida. Isto é, que não mandamos o mesmo elemento de \(V\) para dois lugares diferentes sem querer. Mas isso segue pois todo elemento de \(V\) tem uma única expressão como combinação linear dos elementos da base.
\(T_f\) é TL. Dados \(\ul{u}, \ul{v}\in V\), escreva \[\ul{u} = \lambda_1 \ul{b_1} + \cdots + \lambda_n\ul{b_n}\] \[\ul{v} = \mu_1 \ul{b_1} + \cdots + \mu_n\ul{b_n},\] (já que alguns dos \(\lambda_i, \mu_i\) podem ser \(0\), não tem problema de escrever assim). Então, \[\begin{aligned} T_f(\ul{u} + \ul{v}) & = T_f\left((\lambda_1 + \mu_1) \ul{b_1} + \cdots + (\lambda_n + \mu_n)\ul{b_n}\right) \\ & = (\lambda_1 + \mu_1) f(\ul{b_1}) + \cdots + (\lambda_n + \mu_n)f(\ul{b_n}) \\ & = \left(\lambda_1f(\ul{b_1}) + \cdots + \lambda_nf(\ul{b_n})\right) + \left(\mu_1 f(\ul{b_1}) + \cdots + \mu_nf(\ul{b_n})\right) \\ & = T_f(\ul{u}) + T_f(\ul{v}). \end{aligned}\] Exercício: Prove que \(T_f(\lambda\ul{u}) = \lambda T_f(\ul{u})\,\forall \lambda\in \R, \forall \ul{v}\in V\).
Agora temos uma função \[\varphi:\{f\colon B\to W\mid \mbox{$f$ é uma função}\}\longrightarrow \{T\colon V\to W\mid \mbox{$T$ é TL}\}\] dada por \(f\mapsto T_f\). Afirmo que \(\varphi\) é bijetiva:
Dada uma TL \(T:V\to W\), podemos restringir o domínio para \(B\) para obter uma função \(T|_{B} : B\to W\). Mas \(T = \varphi(T|_{B})\).
Suponha que \(f,g:B\to W\) são funções tais que \(T_f = T_g\). Para todo \(\ul{b}\in B\) temos \[f(\ul{b}) = T_f(\ul{b}) = T_g(\ul{b}) = g(\ul{b})\] então \(f=g\) e \(\varphi\) é injetiva.
◻
Agora sejam \(V = \R^m\,,\,W = \R^n\) com elementos escritos como vetores colunas, e \[B = \{E_1\,,\,E_2\,,\,\ldots\,,\,E_m\} = \left\{\begin{pmatrix} 1 \\ 0 \\ 0 \\ \vdots \\ 0 \end{pmatrix}\,,\,\begin{pmatrix} 0 \\ 1 \\ 0 \\ \vdots \\ 0 \end{pmatrix}\,,\,\ldots\,,\,\begin{pmatrix} 0 \\ 0 \\ 0 \\ \vdots \\ 1 \end{pmatrix}\right\}\] a base canônica de \(V\). Do teorema, uma transformação linear \(T:V\to W\) está determinada completamente pelas imagens dos elementos de \(B\). Escreva \[T(E_j) = \begin{pmatrix} a_{1j} \\ a_{2j} \\ \vdots \\ a_{nj} \end{pmatrix}\in W = \R^n.\] Seja \(A\) a matriz \(n\times m\) cuja \(j\)-ésima coluna é \(T(E_j)\): \[A = \begin{pmatrix} T(E_1) & T(E_2) & \cdots & T(E_m) \end{pmatrix} = \begin{pmatrix} a_{11} & \cdots & a_{1j} & \cdots & a_{1m} \\ a_{21} & \cdots & a_{2j} & \cdots & a_{2m} \\ \vdots & & \vdots & & \vdots \\ a_{n1} & \cdots & a_{nj} & \cdots & a_{nm} \end{pmatrix}.\] Afirmo que \(T = T_A\). Para ver isso, basta confirmar que \(T_A(E_j) = T(E_j)\) para cada elemento da base de \(V\). Mas \[\begin{aligned} T_A(E_j) & = \begin{pmatrix} a_{11} & \cdots & a_{1j} & \cdots & a_{1m} \\ a_{21} & \cdots & a_{2j} & \cdots & a_{2m} \\ \vdots & & \vdots & & \vdots \\ a_{n1} & \cdots & a_{nj} & \cdots & a_{nm} \end{pmatrix}\cdot \begin{pmatrix} 0 \\ \vdots \\ 1 \\ \vdots \\ 0 \end{pmatrix}\quad(j\hbox{-ésima linha}) \\ & = \begin{pmatrix} a_{1j} \\ a_{2j} \\ \vdots \\ a_{nj} \end{pmatrix} \\ & = T(E_j).\qquad\qquad \checkmark \end{aligned}\]
Já que toda matriz \(n\times m\) \(A\) dá uma TL \(T_A:\R^m\to \R^n\) e toda TL \(\R^m\to \R^n\) tem a forma \(T_A\) para alguma matriz \(n\times m\), mostramos de alguma forma que matrizes \(n\times m\) e TLs \(\R^m\to \R^n\) são “a mesma coisa”. Vamos fazer essa frase cada vez mais precisa.
Definição 48.2 Um isomorfismo \(\rho:V\to W\) de espaços vetoriais é uma transformação linear \(\rho:V\to W\) bijetiva (Definição 8.3). Quando existir um isomorfismo de \(V\) a \(W\), diremos que \(V,W\) são espaços vetoriais isomorfos.
Pensamos em espaços vetoriais isomorfos como sendo essencialmente iguais (como espaços vetoriais) – o isomorfismo está simplesmente “renomeando” os elementos. Vamos falar mais sobre espaços vetoriais isomorfos depois.
Exemplo 48.3
O espaço vetorial \(P_3\) de polinômios de grau menor ou igual a três é isomorfo ao espaço \(\R^4\). O isomorfismo é a TL \[T:P_3\to \R^4,\qquad \alpha_0+\alpha_1x+\alpha_2x^2+\alpha_3x^3\mapsto (\alpha_0,\alpha_1,\alpha_2,\alpha_3).\]
O espaço vetorial \(M_{2,3}(\R)\) de matrizes \(2\times 3\) é isomorfo a \(\R^6\); o isomorfismo é \[T:M_{2,3}(\R)\to \R^6,\qquad \begin{pmatrix} a_{11} & a_{12} & a_{13}\\ a_{21} & a_{22} & a_{23} \end{pmatrix} \mapsto (a_{11},a_{12},a_{13},a_{21},a_{22},a_{23}).\]
Teorema 48.3 Sejam \(V = \R^m\) e \(W = \R^n\). A função \[\rho : M_{n,m}(\R) \to \mathcal{L}(V,W)\] dada por \(A\mapsto T_A\) é um isomorfismo de espaços vetoriais.
Comprovação. A função \(\rho\) é
Pois \(A,B\in M_{n,m}(\R)\) com \(T_A= T_B\) implica que \(T_A(E_j) = T_B(E_j)\,\forall j\). Ou seja, as \(j\)-ésima colunas de \(A,B\) são iguais para cada \(j\), logo \(A=B\).
Mostramos acima que qualquer TL de \(V\) a \(W\) tem a forma \(T_A\) para alguma matriz \(n\times m\) \(A\).
Dadas matrizes \(A,B\), dizer que \(\rho(A+B) = \rho(A) + \rho(B)\) é dizer que \(T_{A+B} = T_A + T_B\) como funções \(V\to W\). Mas essas funções são iguais se, e somente se, \(T_{A+B}(\ul{v}) = (T_A+T_B)(\ul{v})\,\forall \ul{v}\in V\). Vamos lá:
\[ \begin{aligned} T_{A+B}(\ul{v}) & = (A+B)\cdot \ul{v} \\ & = A\ul{v} + B\ul{v} \\ & = T_A(\ul{v}) + T_B(\ul{v}) \\ & = (T_A + T_B)(\ul{v}).\qquad\checkmark \end{aligned} \]
Exercício: Mostre que \(\rho(\lambda A) = \lambda\rho(A)\).
◻
Exemplo 48.4 Encontre as matrizes
\(A\) da TL \(S:\R^3\to \R^3\) que faz uma reflexão no plano \(xy\),
\(B\) da TL \(T:\R^3\to \R^3\) que faz uma rotação por \(90\) graus em torno do eixo \(z\),
\(C\) da TL que faz \(S\) e depois faz \(T\).
R:
As colunas da matriz \(A\) são as imagens dos vetores da base canônica de \(\R^3\). Então vamos pegar um vetor da base canônica e refletir ele no plano \(xy\): \[(1,0,0)\mapsto (1,0,0)\] \[(0,1,0)\mapsto (0,1,0)\] \[(0,0,1)\mapsto (0,0,-1).\] A matriz é \[A = \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & -1 \end{pmatrix}.\]
Para calcular \(B\), faremos uma rotação por \(90\) graus em torno do eixo \(z\) dos vetores da base canônica:
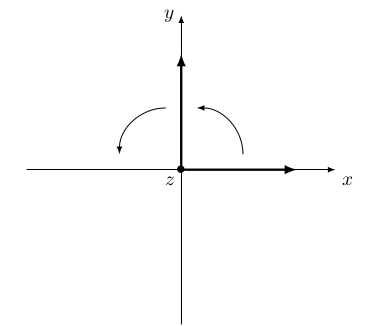
A rotação por 90 graus \[(1,0,0)\mapsto (0,1,0)\] \[(0,1,0)\mapsto (-1,0,0)\] \[(0,0,1)\mapsto (0,0,1).\] A matriz é \[B = \begin{pmatrix} 0 & -1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1 \end{pmatrix}.\]
Para calcular \(C\), reflete os vetores da base canônica no plano \(xy\) e depois virar eles por \(90\) graus em torno do eixo \(z\): \[(1,0,0)\xrightarrow{\hbox{refletir}}(1,0,0)\xrightarrow{\hbox{virar}}(0,1,0)\] \[(0,1,0)\xrightarrow{\hbox{refletir}}(0,1,0)\xrightarrow{\hbox{virar}}(-1,0,0)\] \[(0,0,1)\xrightarrow{\hbox{refletir}}(0,0,-1)\xrightarrow{\hbox{virar}}(0,0,-1)\] A matriz é \[C = \begin{pmatrix} 0 & -1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & -1 \end{pmatrix}.\]
Observe que \[\begin{aligned} (\hbox{matriz de }T)\cdot(\hbox{matriz de }S) & = B\cdot A \\ & = \begin{pmatrix} 0 & -1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1 \end{pmatrix}\cdot \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & -1 \end{pmatrix} \\ & = \begin{pmatrix} 0 & -1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & -1 \end{pmatrix} \\ & = C \\ & = (\hbox{matriz de }T\circ S). \end{aligned}\]
De fato, a matriz da composição de TLs (Definição 8.4) é sempre o produto das matrizes das TLs. Suponha que temos três espaços vetoriais \(\R^l, \R^m, \R^n\) com bases canônicas \[\begin{aligned} E_k\quad & ,\quad k\in \{1,\ldots,l\} \\ F_j\quad & ,\quad j\in \{1,\ldots,m\} \\ G_i\quad & ,\quad i\in \{1,\ldots,n\} \end{aligned}\] respetivamente. Suponha que temos TLs \[\R^l \xrightarrow{T_A} \R^m \xrightarrow{T_B} \R^n\] onde \(A\) é uma matriz \(m\times l\), \(B\) é uma matriz \(n\times m\), e \(T_A, T_B\) são as TLs correspondentes.
Teorema 48.4 A matriz \(n\times l\) da composição \(T_B\circ T_A\) (Definição 8.4) é a matriz produto \(BA\). Ou seja, \[T_B\circ T_A = T_{BA}.\]
Comprovação. ’Observe primeiro que \(A\) e \(B\) são matrizes \(m\times l\) e \(n\times m\), respetivamente, portanto o produto \(BA\) pode ser calculado e este produto vai ser uma matriz \(n\times l\). Seja \(\ul v\in \R^l\) considerando como vetor coluna \(l\times 1\) e verifiquemos que \[(T_B\circ T_A)(\ul v)= T_B(T_A(v))=T_B(A\ul v)=B(A\ul v)=(BA)\ul v=T_{BA}(\ul v).\] ◻
Então, a conclusão é: “matrizes são transformações lineares entre espaços vetoriais da forma \(\R^n\) com respeito às bases canônicas. A composição de tais TLs é dada pela multiplicação das matrizes correspondentes.”
Uma de nossas tarefas principais agora é para generalizar essa frase para quaisquer espaços vetoriais de dimensão finita, e quaisquer bases deles.